Folds are idealised using the following plane-strain equations:
The fold amplitude is AB, and factors B and C are stretches (homogeneous strain). If C = 1/B deformation is constant volume. Subscripts 1 and 2 in the equations below denote the fold parameters of the 1st and 2nd set of folds.
The orientations of the folds are given by dip directions θ and dips δ of the fold axial planes, and by the pitches (or rakes) φ of the fold axes. The rotation angles used in the equations listed below are given by:
where subscripts 1 and 2 denote the orientations of the 1st and 2nd set of folds (the minus sign for the z-rotations is used because clockwise rotation in geology (e.g. stereonet) is positive and negative in mathematics).
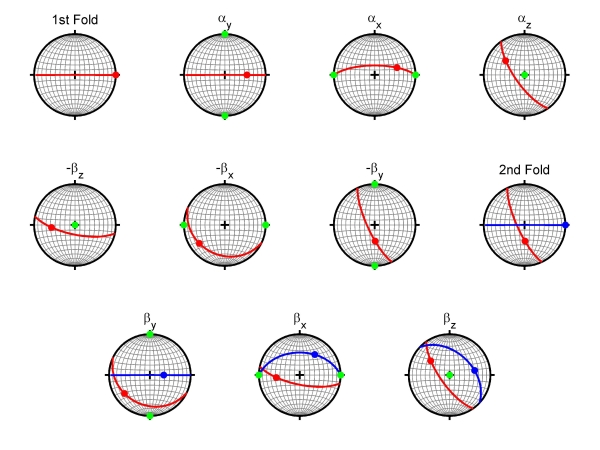
Because the fold equations result in folds that are upright, with horizontal fold axes, various rotations are required to take into account the different fold orientations. The different steps required for superposed folding are illustrated using stereonets in the diagram below using a Cartesian co-ordinate system where x is E-W, y is N-S and z is vertical. Rotation axes are shown in green, first fold in red and second fold in blue:
- 1st folding.
- Rotate 1st fold to its position (FAP1 = 235/71 and φ1 = -45 in the example shown) with rotations αy, αx and αz.
- Rotate 1st fold so that the 2nd fold orientation is FAP2 = 000/90 and φ2 = 0 using rotations -βz, -βx and -βy.
- 2nd folding.
- Rotate both folds so that the 2nd fold is in its required position (FAP2 = 043/44 and φ2 = -62 in the example shown) with rotations βy, βx and βz.
The steps described and illustrated above are Lagrangian, where finite (deformed) positions are expressed as functions of their original positions. These equations can be used, for example, to plot the folded surface in 3D. In order to construct an interference pattern, however, Eulerian forms are required that express the initial (undeformed) positions as a function of their finite (deformed) positions. The folding equation at the top of this page, for example, is written in its Eulerian form as:
Basically we need to determine for points that describe the surface where the interference pattern is observed (e.g. outcrop) where these points came from. If we know for each point where it came from, i.e. its initial position (x0,y0,z0), then we can also determine from which layer it came from. If, for example, initial layering was horizontal, then we need to calculate z0 for each point on the surface of observation and then colour points that have z0-values within a given interval defined by the initial position of the upper and lower boundary of that layer.
The complete set of equations in their Eulerian form are:
βz - rotation:
βx - rotation:
βy - rotation:
2nd fold, i.e. refold fold:
-βy - rotation:
-βx - rotation:
-βz - rotation:
αz - rotation:
αx - rotation:
αy - rotation:
1st fold:
One can obtain an expression z0 = f(xf,yf,zf) by substituting the first set into the second, the second into the third and so on; the final equation is very long and used in the Matlab script.